广川为半导体多种工艺设备
提供传输解决方案





真空机器人是半导体真空工艺设备传输的重要核心部件,机器人的稳定性,高精度,高效率将直接影响工艺的稳定,良率及产能。
广川的真空机器人具有高效率,高精度,高稳定性等特点,可结合真空工艺设备需求匹配合适的机器人,或进行轻微的定制化服务。
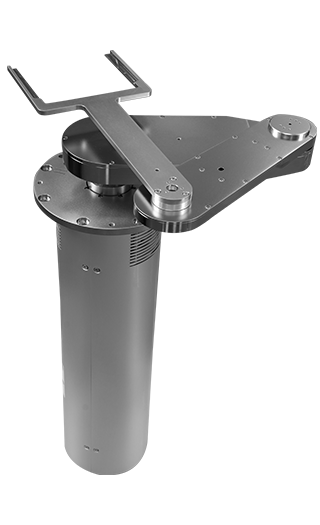
| 项目 | 规格 | |
|---|---|---|
| 晶圆尺寸 | 150mm(托盘/wafer) | |
| 晶圆夹持方式 | 下托式 | |
| 轴数 | 3轴 | |
| 可搬重量(标准末端执行器+晶圆)/(每个末端执行器) | 2kg | |
| 动作 范围 |
R轴(伸缩)(*1) | -379~505mm(根据手指变化,伸出距离也变化) |
| T轴(旋转) | 360°(无限循环) | |
| Z轴(升降) | 40mm | |
| 重复定位精度 | R(Radial)≤0.05mm(3σ) | |
| θ(Rotational)≤0.1mm(3σ) | ||
| Z(vertical)≤0.1mm(3σ) | ||
| 安装方式 | Top Mount/Top Bolt | |
| 最小旋转直径(*2) | Φ630mm | |
| 真空度 | ≤1.33x10-6 Pa | |
| 本体重量 | 30kg | |
*1、伸缩距离基于广川的标准末端执行器长度。
*2、依据广川的标准末端执行器最小旋转直径为630mm,手指长度不同,旋转直径也会随之变化。

| 项目 | 规格 | |
|---|---|---|
| 适用晶圆尺寸 | 200mm/300mm | |
| 动作 范围 |
(R轴)伸缩范围(*1) | 951mm(含末端执行器)(根据手指变化,伸出距离也变化) |
| (TH轴)旋转范围 | 360°(无限循环) | |
| (Z轴)升降范围 | 150mm | |
| 安装方式 | Top Mount and Top Bolt | |
| 本体重量 | 120kg | |
| 真空度 | ≤3E-8Torr | |
| 漏率 | ≤5E-9std·cc/s He | |
| 重复定位精度 | R(Radial)≤0.1mm(3σ) | |
| θ(Rotational)≤0.1mm(3σ) | ||
| Z(vertical)≤0.05mm(3σ) | ||
| 通讯协议 | Ethernet(TCP/IP) | |
*1、伸缩距离基于广川的标准末端执行器长度。

| 项目 | 规格 | |
|---|---|---|
| 适用晶圆尺寸 | 300mm/200mm | |
| 动作 范围 |
(R轴)伸缩范围(*1) | 968mm(含末端执行器)(根据手指变化,伸出距离也变化) |
| (TH轴)旋转范围 | 360°(无限循环) | |
| (Z轴)升降范围 | 150mm | |
| 最小旋转直径(*2) | ∅855mm | |
| 本体重量 | 110kg | |
| 真空度 | ≤7.5E-5Torr | |
| 漏率 | ≤5E-9std·cc/s He | |
| 重复定位精度 | R(Radial)≤0.05mm(3σ) | |
| θ(Rotational)≤0.1mm(3σ) | ||
| Z(vertical)≤0.05mm(3σ) | ||
| 通讯协议 | Ethernet(TCP/IP) | |
*1、伸缩距离基于广川的标准末端执行器长度。
*2、依据广川的标准末端执行器最小旋转直径为630mm,手指长度不同,旋转直径也会随之变化。
