Hirokawa delivers transmission solutions for a wide range of semiconductor process equipment


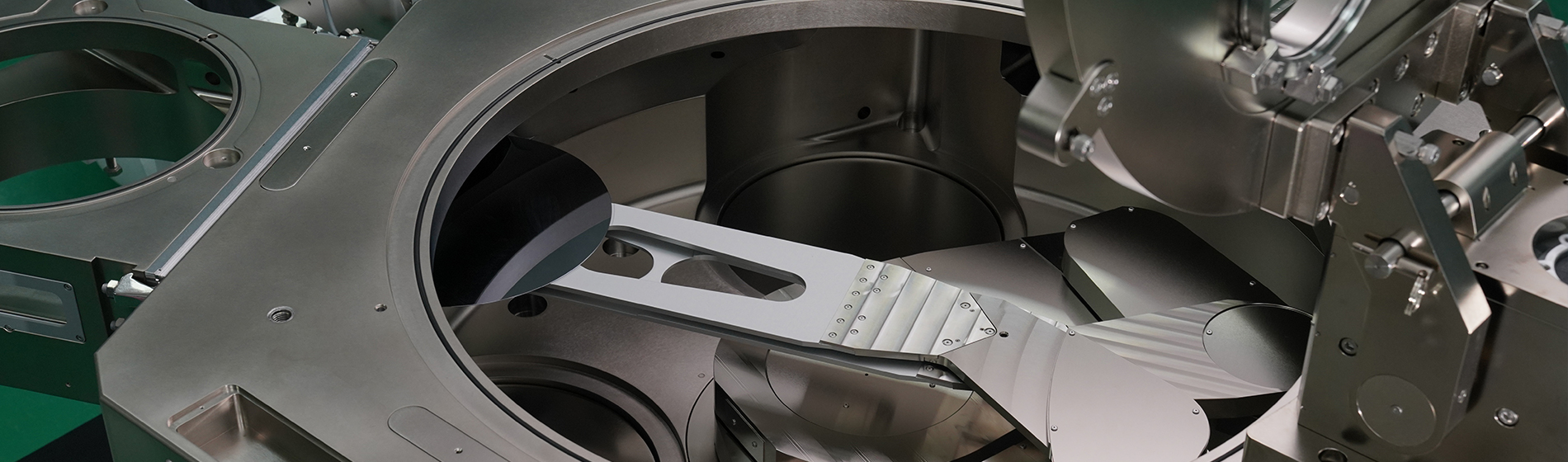



Atmospheric robots are primarily utilized in the front-end modules (EFEM) of semiconductor process equipment, as well as within the process tools themselves.Typically applied within EFEM or as primary atmospheric transfer mechanisms in process modules, including diffusion, cleaning, inspection, and CMP equipment Hirokawa’s atmospheric robots are characterized by high precision and outstanding stability, providing customized solutions tailored to the specific requirements of clients.

| Item | Specification | |
|---|---|---|
| Applicable Wafer Size | 300mm (200mm)(*1) | |
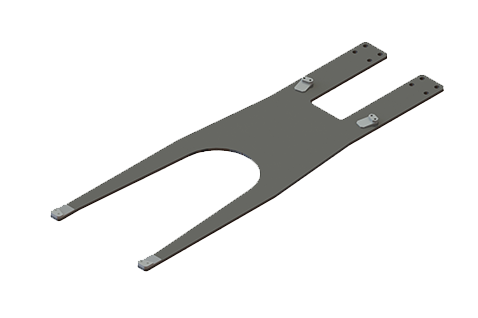
| Wafer Gripping Method | Vacuum Adsorption, Edge Gripping,Friction | |
| Standard End Effector Length (*2) | 345mm | |
| Number of Drive Axes | 5 axes | |
| Arm Type | Single arm | |
| Motion Range | R axis (extension)(*3) | 1215mm |
| θ axis (rotation) | 330° | |
| Z axis (vertical lift) | 480mm | |
| B axis (rotation) | 440° | |
| Maximum rotation radius | 510mm | |
| Repeat positioning accuracy | 0.1mm(P-P) | |
| Mass | 76kg | |
| Cleanliness class(*5) | ISO Class 1 | |
*1、Hirokawa standard end effector (300mm: edge grip/vacuum adsorption; 200mm: vacuum adsorption).
*2、300mm wafer (SEMI standard specification), used with Hirokawa standard 300mm-compatible end effector.
*3、The robot arm rotation center position relative to the wafer center position (Hirokawa standard for 300mm-compatible to the end effector)
*4、Wafer specifications are preliminarily based on SEMI standards. For special quartz wafers, please contact Hirokawa. Hirokawa also supports quartz wafers (with physical samples). However, according to quartz specifications, Hirokawa conducts necessary assessments and testing.
*5、Measurement values obtained within Hirokawa’s cleanliness measurement chamber.

| Item | Specification | ||
|---|---|---|---|
| Applicable wafer dimensions | 300mm/200mm/150mm/100mm/75mm/50mm | 300mm/200mm(*1) | |
| Wafer Gripping Method | vacuum adsorption | Edge grip | |
| Number of axes | 4 axes | ||
| Load capacity (end effector + wafer) / (average per individual end effector) | 1.0kg | ||
| Motion Range |
R axis (extension) (*2) | 657mm | |
| TH shaft (rotation) | 360° | ||
| Z axis (lift) | 380mm | ||
| Repeat positioning accuracy | R axis (extension)(*3) | p-p 0.1mm | |
| TH shaft (rotation) | |||
| Z axis (lift) | |||
| minimum rotary diameter | 510mm(*4) | ||
| Cleanliness class(*5) | ISO Class 1 | ||
| Reference body mass | 45kg | ||
*1、Payload is for Hirokawa standard end effector.
*2、The extension length value is measured when using Hirokawa standard end effector.
*3、Repeat positioning accuracy complies with the JIS B8432 Pose repeatability standard.
*4、Minimum rotary diameter when using Hirokawa standard end effector.
*5、Based on the measured values obtained from Hirokawa cleanliness measurement chamber.
| Item | Specification | |
|---|---|---|
| Applicable wafer dimensions | 300mm | |
| Payload (excluding end effector) | 10kg (300mm 25slot FOUP) | |
| Number of axes | 3-axis | |
| Motion Range |
R axis | ±460mm(*1) |
| Y axis | 520mm | |
| Z axis | 2400mm | |
| Repeat positioning accuracy | R axis (extension) | ±0.5mm |
| Y axis (lateral movement) | ±0.5mm | |
| Z axis (lift) | ±0.5mm | |
*1、The extension stroke is based on the length of Hirokawa's standard end effector.

| Item | Specification | |
|---|---|---|
| Applicable wafer dimensions | 300mm/200mm(*1) | |
| Number of axes | 4 axes | |
| Payload (standard end effector + wafer) / (per individual end effector) | 0.55kg | |
| Motion Range |
R axis (extension) (*3)(*2) | 603.5mm |
| S axis (rotation) | 360° | |
| Z axis (lift) | 400mm | |
| F axis (flipping) | 270° | |
| Repeat positioning accuracy | R axis (extension) (*3) | p-p 0.1mm |
| S axis (rotation) | ||
| Z axis (lift) | ||
| F axis (flipping) | ||
| Maximum rotation diameter | 540mm(*4) | |
| Cleanliness class(*5) | ISO Class1 | |
*1、Payload is for Hirokawa standard end effector.
*2、The extension length value is measured when using Hirokawa standard end effector. Also, the S axis can not operate beyond its motion range.
*3、Repeat positioning accuracy complies with the JIS B8432 Pose repeatability standard.
*4、Minimum rotary diameter when using Hirokawa standard end effector.
*5、Based on the measured values obtained from Hirokawa cleanliness measurement chamber.

| Item | Specification | |
|---|---|---|
| Applicable wafer dimensions | 300mm/200mm(*1) | |
| Number of axes | 4轴 | |
| Payload (standard end effector + wafer) / (per individual end effector) | 0.8kg | |
| Motion Range |
R axis (extension) (*2) | 650mm |
| S axis (rotation) | 360° | |
| Z axis (lift) | 400mm | |
| Repeat positioning accuracy | R axis (extension)(*3) | p-p 0.1mm |
| S axis (rotation) | ||
| Z axis (lift) | ||
| Maximum speed(Acceleration/Decelerate time) | R axis (extension) | 260°/s=1452 mm/s(0.2s) |
| S axis (rotation) | 290°/s(0.2s) | |
| Z axis (lift) | 300mm/s(0.2s) | |
| Maximum rotation diameter | 540mm(*4) | |
| Cleanliness classification(*5) | ISO Class1 | |
*1、Payload is for Hirokawa standard end effector.
*2、The extension length value is measured when using Hirokawa standard end effector. Also, the S axis can not operate beyond its motion range.
*3、Repeat positioning accuracy complies with the JIS B8432 Pose repeatability standard.
*4、Minimum rotary diameter when using Hirokawa standard end effector.
*5、 Based on the measured values obtained from Hirokawa cleanliness measurement chamber.